






Opis
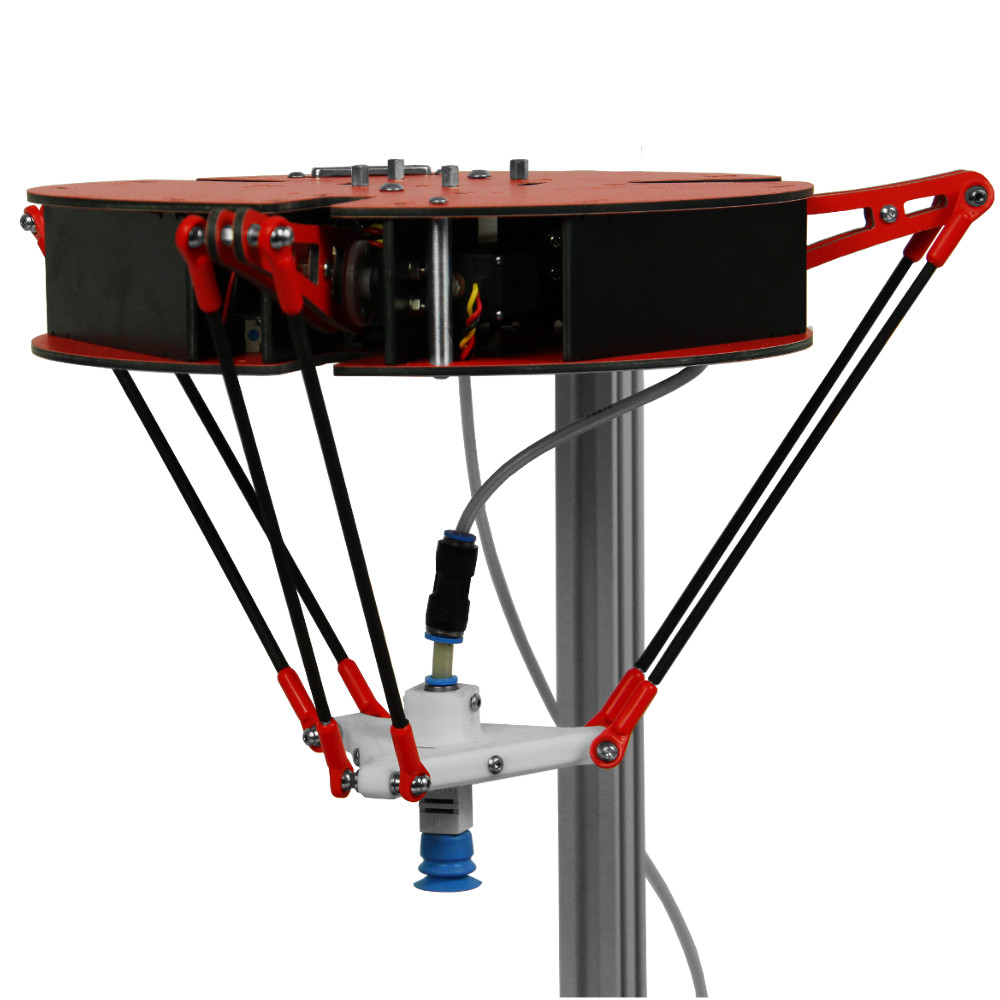
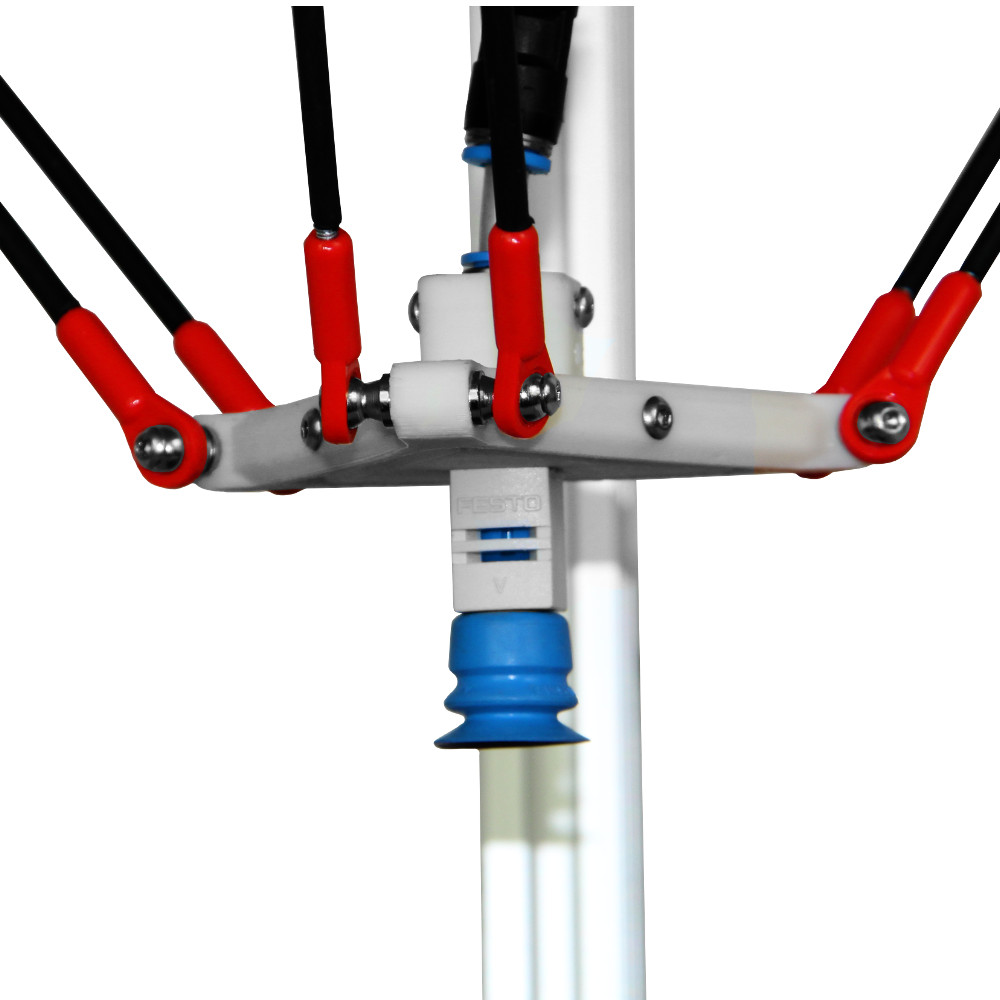
Takie konstrukcje charakteryzuje bardzo wysoka dynamika pracy. Dzięki temu coraz częściej roboty tej konstrukcji wypierają w przemyśle w zastosowaniach handlingowych tradycyjne roboty typu Puma, czyli typowe wielo-przegubowe ramiona. Standardowo robot wyposażony jest w chwytak podciśnieniowy. Na życzenie klienta możemy zamocować chwytak dwu-szczękowy lub dwu-szczękowy z dodatkowym serwem do realizacji dodatkowego obrotu w osi chwytaka. Do sterowania Naszego tripoda zastosowaliśmy kontroler używany do sterowania robota RobTRAIN I. Dzięki czemu obok możliwości wysterowania samego robota mamy do dyspozycji dodatkowo interfejs sygnałów wejścia/wyjścia binarnego i wejść analogowych oraz możliwość podłączenia dodatkowych serwomechanizmów czy silników DC z enkoderem. To umożliwia współpracę z dodatkowymi czujniki, napędami czy współpracę ze sterownikiem PLC. Opisana funkcjonalność pozwala na zastosowanie Delty I w modelach zrobotyzowanych gniazd produkcyjnych. Robot DELTA I współpracuje z robotem RobTrain I , „Mariankiem” plexi, Mariankiem II, Duopodem, Dobotem, Modułami CIM.






Opinie
Na razie nie ma opinii o produkcie.